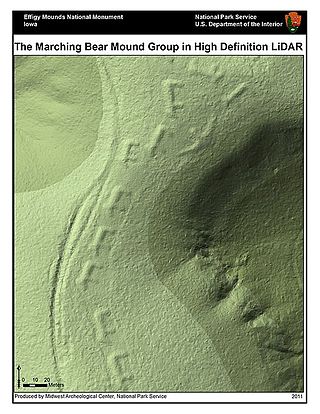
Lidar is a method for determining ranges by targeting an object or a surface with a laser and measuring the time for the reflected light to return to the receiver. Lidar may operate in a fixed direction or it may scan multiple directions, in which case it is known as lidar scanning or 3D laser scanning, a special combination of 3-D scanning and laser scanning. Lidar has terrestrial, airborne, and mobile applications.

A digital elevation model (DEM) or digital surface model (DSM) is a 3D computer graphics representation of elevation data to represent terrain or overlaying objects, commonly of a planet, moon, or asteroid. A "global DEM" refers to a discrete global grid. DEMs are used often in geographic information systems (GIS), and are the most common basis for digitally produced relief maps. A digital terrain model (DTM) represents specifically the ground surface while DEM and DSM may represent tree top canopy or building roofs.

A point cloud is a discrete set of data points in space. The points may represent a 3D shape or object. Each point position has its set of Cartesian coordinates. Point clouds are generally produced by 3D scanners or by photogrammetry software, which measure many points on the external surfaces of objects around them. As the output of 3D scanning processes, point clouds are used for many purposes, including to create 3D computer-aided design (CAD) or geographic information systems (GIS) models for manufactured parts, for metrology and quality inspection, and for a multitude of visualizing, animating, rendering, and mass customization applications.

In geology, a fault is a planar fracture or discontinuity in a volume of rock across which there has been significant displacement as a result of rock-mass movements. Large faults within Earth's crust result from the action of plate tectonic forces, with the largest forming the boundaries between the plates, such as the megathrust faults of subduction zones or transform faults. Energy release associated with rapid movement on active faults is the cause of most earthquakes. Faults may also displace slowly, by aseismic creep.
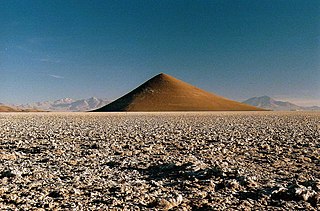
A landform is a natural or anthropogenic land feature on the solid surface of the Earth or other planetary body. Landforms together make up a given terrain, and their arrangement in the landscape is known as topography. Landforms include hills, mountains, canyons, and valleys, as well as shoreline features such as bays, peninsulas, and seas, including submerged features such as mid-ocean ridges, volcanoes, and the great ocean basins.

Photogrammetry is the science and technology of obtaining reliable information about physical objects and the environment through the process of recording, measuring and interpreting photographic images and patterns of electromagnetic radiant imagery and other phenomena.
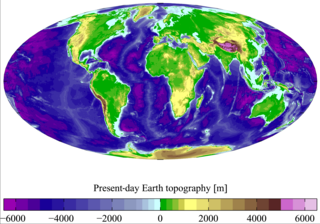
Terrain or relief involves the vertical and horizontal dimensions of land surface. The term bathymetry is used to describe underwater relief, while hypsometry studies terrain relative to sea level. The Latin word terra means "earth."
Bathymetry is the study of underwater depth of ocean floors, lake floors, or river floors. In other words, bathymetry is the underwater equivalent to hypsometry or topography. The first recorded evidence of water depth measurements are from Ancient Egypt over 3000 years ago. Bathymetric charts, are typically produced to support safety of surface or sub-surface navigation, and usually show seafloor relief or terrain as contour lines and selected depths (soundings), and typically also provide surface navigational information. Bathymetric maps may also use a Digital Terrain Model and artificial illumination techniques to illustrate the depths being portrayed. The global bathymetry is sometimes combined with topography data to yield a global relief model. Paleobathymetry is the study of past underwater depths.

Slope stability refers to the condition of inclined soil or rock slopes to withstand or undergo movement; the opposite condition is called slope instability or slope failure. The stability condition of slopes is a subject of study and research in soil mechanics, geotechnical engineering and engineering geology. Analyses are generally aimed at understanding the causes of an occurred slope failure, or the factors that can potentially trigger a slope movement, resulting in a landslide, as well as at preventing the initiation of such movement, slowing it down or arresting it through mitigation countermeasures.

Surface roughness can be regarded as the quality of a surface of not being smooth and it is hence linked to human (haptic) perception of the surface texture. From a mathematical perspective it is related to the spatial variability structure of surfaces, and inherently it is a multiscale property. It has different interpretations and definitions depending on the disciplines considered.
3D scanning is the process of analyzing a real-world object or environment to collect three dimensional data of its shape and possibly its appearance. The collected data can then be used to construct digital 3D models.
Structure from motion (SfM) is a photogrammetric range imaging technique for estimating three-dimensional structures from two-dimensional image sequences that may be coupled with local motion signals. It is studied in the fields of computer vision and visual perception.
Slope mass rating (SMR) is a rock mass classification scheme developed by Manuel Romana to describe the strength of an individual rock outcrop or slope. The system is founded upon the more widely used RMR scheme, which is modified with quantitative guidelines to the rate the influence of adverse joint orientations.
Slope stability analysis is a static or dynamic, analytical or empirical method to evaluate the stability of slopes of soil- and rock-fill dams, embankments, excavated slopes, and natural slopes in soil and rock. It is performed to assess the safe design of a human-made or natural slopes and the equilibrium conditions. Slope stability is the resistance of inclined surface to failure by sliding or collapsing. The main objectives of slope stability analysis are finding endangered areas, investigation of potential failure mechanisms, determination of the slope sensitivity to different triggering mechanisms, designing of optimal slopes with regard to safety, reliability and economics, and designing possible remedial measures, e.g. barriers and stabilization.

A digital outcrop model (DOM), also called a virtual outcrop model, is a digital 3D representation of the outcrop surface, mostly in a form of textured polygon mesh.

There are a number of different specialized magnetic compasses used by geologists to measure orientation of geological structures, as they map in the field, to analyze and document the geometry of bedding planes, joints, and/or metamorphic foliations and lineations. In this aspect the most common device used to date is the analogue compass.

CloudCompare is a 3D point cloud processing software. It can also handle triangular meshes and calibrated images.
Tree height is the vertical distance between the base of the tree and the tip of the highest branch on the tree, and is difficult to measure accurately. It is not the same as the length of the trunk. If a tree is leaning, the trunk length may be greater than the height of the tree. The base of the tree is where the projection of the pith (center) of the tree intersects the existing supporting surface upon which the tree is growing or where the seed sprouted. If the tree is growing on the side of a cliff, the base of the tree is at the point where the pith would intersect the cliff side. Roots extending down from that point would not add to the height of the tree. On a slope this base point is considered as halfway between the ground level at the upper and lower sides of the tree. Tree height can be measured in a number of ways with varying degrees of accuracy.

In geology and geomorphology, an erosion surface is a surface of rock or regolith that was formed by erosion and not by construction nor fault displacement. Erosional surfaces within the stratigraphic record are known as unconformities, but not all unconformities are buried erosion surfaces. Erosion surfaces vary in scale and can be formed on a mountain range or a rock. Particularly large and flat erosion surfaces receive the names of peneplain, paleoplain, planation surface or pediplain. An example of erosion surface is road surface erosion which is caused by natural and anthropogenic factors. Erosion surface can be measured through direct, contact measurement methods and indirect, non-contact measurement methods.
Global Ecosystem Dynamics Investigation (GEDI, pronounced ) is a NASA mission to measure how deforestation has contributed to atmospheric CO2 concentrations. A full-waveform LIDAR was attached to the International Space Station to provide the first global, high-resolution observations of forest vertical structure. This will allow scientists to map habitats and biomass, particularly in the tropics, providing detail on the Earth's carbon cycle.