Vector representing the position of a point with respect to a fixed origin
Radius vector represents the position of a point with respect to origin O. In Cartesian coordinate system
In geometry, a position or position vector, also known as location vector or radius vector, is a Euclidean vector that represents a pointP in space. Its length represents the distance in relation to an arbitrary reference originO, and its direction represents the angular orientation with respect to given reference axes. Usually denoted x, r, or s, it corresponds to the straight line segment from O to P. In other words, it is the displacement or translation that maps the origin to P:[1]
The relative position of a point Q with respect to point P is the Euclidean vector resulting from the subtraction of the two absolute position vectors (each with respect to the origin):
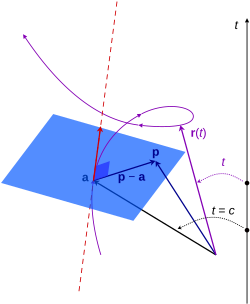
Space curve in 3D. The position vectorr is parameterized by a scalar t. At r = a the red line is the tangent to the curve, and the blue plane is normal to the curve.
In three dimensions, any set of three-dimensional coordinates and their corresponding basis vectors can be used to define the location of a point in space—whichever is the simplest for the task at hand may be used.
where t is a parameter, owing to their rectangular or circular symmetry. These different coordinates and corresponding basis vectors represent the same position vector. More general curvilinear coordinates could be used instead and are in contexts like continuum mechanics and general relativity (in the latter case one needs an additional time coordinate).
n dimensions
Linear algebra allows for the abstraction of an n-dimensional position vector. A position vector can be expressed as a linear combination of basis vectors:[3][4]
The set of all position vectors forms position space (a vector space whose elements are the position vectors), since positions can be added (vector addition) and scaled in length (scalar multiplication) to obtain another position vector in the space. The notion of "space" is intuitive, since each xi (i = 1, 2, …, n) can have any value, the collection of values defines a point in space.
The dimension of the position space is n (also denoted dim(R) = n). The coordinates of the vector r with respect to the basis vectors ei are xi. The vector of coordinates forms the coordinate vector or n-tuple (x1, x2, …, xn).
Each coordinate xi may be parameterized a number of parameterst. One parameter xi(t) would describe a curved 1D path, two parameters xi(t1, t2) describes a curved 2D surface, three xi(t1, t2, t3) describes a curved 3D volume of space, and so on.
The linear span of a basis set B = {e1, e2, …, en} equals the position space R, denoted span(B) = R.
Position vector fields are used to describe continuous and differentiable space curves, in which case the independent parameter needs not be time, but can be (e.g.) arc length of the curve.
In any equation of motion, the position vector r(t) is usually the most sought-after quantity because this function defines the motion of a particle (i.e. a point mass) – its location relative to a given coordinate system at some time t.
To define motion in terms of position, each coordinate may be parametrized by time; since each successive value of time corresponds to a sequence of successive spatial locations given by the coordinates, the continuum limit of many successive locations is a path the particle traces.
In the case of one dimension, the position has only one component, so it effectively degenerates to a scalar coordinate. It could be, say, a vector in the x direction, or the radial r direction. Equivalent notations include
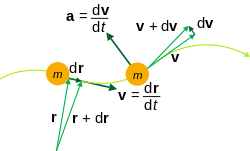
Kinematic quantities of a classical particle: massm, positionr, velocityv, accelerationa
For a position vector r that is a function of time t, the time derivatives can be computed with respect to t. These derivatives have common utility in the study of kinematics, control theory, engineering and other sciences.
These names for the first, second and third derivative of position are commonly used in basic kinematics.[5] By extension, the higher-order derivatives can be computed in a similar fashion. Study of these higher-order derivatives can improve approximations of the original displacement function. Such higher-order terms are required in order to accurately represent the displacement function as a sum of an infinite sequence, enabling several analytical techniques in engineering and physics.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.