
Electronic stability control (ESC), also referred to as electronic stability program (ESP) or dynamic stability control (DSC), is a computerized technology that improves a vehicle's stability by detecting and reducing loss of traction (skidding). When ESC detects loss of steering control, it automatically applies the brakes to help steer the vehicle where the driver intends to go. Braking is automatically applied to wheels individually, such as the outer front wheel to counter oversteer, or the inner rear wheel to counter understeer. Some ESC systems also reduce engine power until control is regained. ESC does not improve a vehicle's cornering performance; instead, it helps reduce the chance of the driver losing control of the vehicle.
A traction control system (TCS), also known as ASR, is typically a secondary function of the electronic stability control (ESC) on production motor vehicles, designed to prevent loss of traction of the driven road wheels. TCS is activated when throttle input and engine power and torque transfer are mismatched to the road surface conditions.

Four-wheel drive, also called 4×4 or 4WD, refers to a two-axled vehicle drivetrain capable of providing torque to all of its wheels simultaneously. It may be full-time or on-demand, and is typically linked via a transfer case providing an additional output drive shaft and, in many instances, additional gear ranges.

The Mitsubishi Lancer Evolution, popularly referred to as the 'Evo', is a sports sedan and rally car based on the Lancer that was manufactured by Japanese manufacturer Mitsubishi Motors from 1992 until 2016. There have been ten official versions to date, and the designation of each model is most commonly a Roman numeral. All generations use two-litre intercooled turbo inline four-cylinder engines and all-wheel drive systems.

Quattro is the trademark used by the automotive brand Audi to indicate that all-wheel drive (AWD) technologies or systems are used on specific models of its automobiles.

Torsen Torque-Sensing is a type of limited-slip differential used in automobiles.
4Matic is the marketing name of an all-wheel drive system developed by Mercedes-Benz. It is designed to increase traction in slippery conditions. With the introduction of the 2017 E 63 S sedan, Mercedes-AMG announced a performance-oriented variant of the system called AMG Performance 4MATIC+.

The Mitsubishi Pajero is a full-size SUV manufactured and marketed globally by Mitsubishi over four generations — introduced in 1981 and discontinued in 2021. The Pajero has generated more than 3.3 million sales in its 40-year run. The name will live on with the smaller Pajero Sport, which is based on the Mitsubishi Triton/L200/Strada. Despite the similarity in name, the Pajero Sport share none of the original Pajero's underpinnings and are smaller in overall size.

BMW xDrive is the marketing name for the all-wheel drive system found on various BMW models since 2003. The system uses an electronically-actuated clutch-pack differential to vary the torque between the front and rear axles. Models with the DPC torque vectoring system also have a planetary gearset to overdrive an axle or rear wheel as required.
ATTESA is a four-wheel drive system used in some automobiles produced by the Japanese automaker Nissan, including some models under its luxury marque Infiniti.
Jeep uses a variety of four-wheel drive systems on their vehicles. These range from basic part-time systems that require the driver to move a control lever to send power to four wheels, to permanent four-wheel systems that monitor and sense traction needs at all four wheels automatically under all conditions.

The Mitsubishi Galant VR-4 was the range-topping version of Mitsubishi Motors' Galant model, available in the sixth (1987–93), seventh (1993–96) and eighth (1996–2002) generations of the vehicle. Originally introduced to comply with the new Group A regulations of the World Rally Championship, it was soon superseded as Mitsubishi's competition vehicle by the Lancer Evolution, and subsequently developed into a high-performance showcase of the company's technology.

The Mitsubishi Lancer Evolution X is the tenth and final generation of the Lancer Evolution, a sports sedan produced by Japanese manufacturer Mitsubishi Motors.

All-Trac was a proprietary full-time four-wheel drive system used on a variety of Toyota badged models from 1988 to 2000. It was considered a revolutionary advance for four wheel drive automobiles into the mainstream consumer market and its electronic/vacuum controlled locking center differential was rare in a passenger car. The system originated in Japan under the GT-Four name in 1986, but was not released in the U.S. until 1988 under the All-Trac name.

Super Select is the brand name of a four-wheel drive system produced by Mitsubishi Motors, used worldwide except for North America, where it was initially known as Active-Trac. It was first introduced in 1991 with the then-new second generation of the Mitsubishi Pajero.
ControlTrac four-wheel drive is the brand name of a selectable automatic full-time four-wheel drive system offered by Ford Motor Company. The four-wheel drive system was designed and developed at BorgWarner under its TorqTransfer Systems division in the mid 1980s. BorgWarner calls the system Torque-On-Demand (TOD). ControlTrac was the first automatic system to use software control and no planetary or bevel geared center differential. Instead of a planetary or bevel geared center differential, the system uses a variable intelligent locking center multi-disc differential.
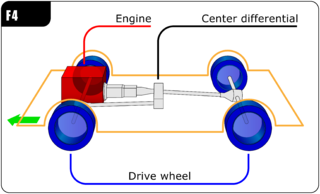
In automotive design, an F4, or front-engine, four-wheel drive (4WD) layout places the internal combustion engine at the front of the vehicle and drives all four roadwheels. This layout is typically chosen for better control on many surfaces, and is an important part of rally racing, as well as off-road driving. In terms of racing purposes, whether it be on-road or off-road, can be described as follows,
A team that pursues the Weak LS4WD architecture will minimize the development cost of the front-wheel drive system at the expense of having a larger rear powertrain. The Weak architecture produces a vehicle with a large powersplit between the front and rear powertrains, while the Strong architecture recommends a vehicle with more similar power and torque requirements for the front and rear.
S-AWC is the brand name of an advanced full-time four-wheel drive system developed by Mitsubishi Motors. The technology, specifically developed for the new 2007 Lancer Evolution, the 2010 Outlander, the 2014 Outlander, the Outlander PHEV and the Eclipse Cross have an advanced version of Mitsubishi Motors' AWC system. Mitsubishi Motors first exhibited S-AWC integration control technology in the Concept-X model at the 39th Tokyo Motor Show in 2005. According to Mitsubishi Motors, "the ultimate embodiment of the company's AWC philosophy is the S-AWC system, a 4WD-based integrated vehicle dynamics control system".
Torque vectoring is a technology employed in automobile differentials that has the ability to vary the torque to each half-shaft with an electronic system; or in rail vehicles which achieve the same using individually motored wheels. This method of power transfer has recently become popular in all-wheel drive vehicles. Some newer front-wheel drive vehicles also have a basic torque vectoring differential. As technology in the automotive industry improves, more vehicles are equipped with torque vectoring differentials. This allows for the wheels to grip the road for better launch and handling.
E-Four, eFour, AWD-i, or AWD-e was developed by Toyota. Front wheels are powered directly by the hybrid powertrain, rear wheels are powered by a dedicated electric motor with its own power control unit, reduction gear and differential. Amount of torque transferred to the rear wheels is automatically adjusted by the vehicle's electronic control unit according to driving conditions. E-Four also adds additional regenerative braking. In North America, Toyota uses the term AWD-i. There is no drive shaft between the front combustion engine and rear wheels. The rear wheels only receive power and torque from the rear electric motor(s).
