
In mathematics, a diffeomorphism is an isomorphism of smooth manifolds. It is an invertible function that maps one differentiable manifold to another such that both the function and its inverse are continuously differentiable.
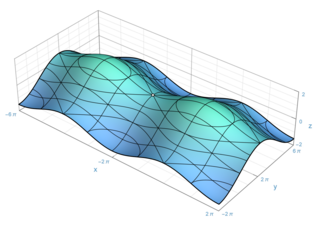
In the part of mathematics referred to as topology, a surface is a two-dimensional manifold. Some surfaces arise as the boundaries of three-dimensional solid figures; for example, the sphere is the boundary of the solid ball. Other surfaces arise as graphs of functions of two variables; see the figure at right. However, surfaces can also be defined abstractly, without reference to any ambient space. For example, the Klein bottle is a surface that cannot be embedded in three-dimensional Euclidean space.
In mathematical analysis, the Haar measure assigns an "invariant volume" to subsets of locally compact topological groups, consequently defining an integral for functions on those groups.
In mathematics, particularly topology, an atlas is a concept used to describe a manifold. An atlas consists of individual charts that, roughly speaking, describe individual regions of the manifold. If the manifold is the surface of the Earth, then an atlas has its more common meaning. In general, the notion of atlas underlies the formal definition of a manifold and related structures such as vector bundles and other fiber bundles.

In mathematics, particularly in complex analysis, a Riemann surface is a one-dimensional complex manifold.

In mathematics, orientability is a property of some topological spaces such as real vector spaces, Euclidean spaces, surfaces, and more generally manifolds that allows a consistent definition of "clockwise" and "anticlockwise". A space is orientable if such a consistent definition exists. In this case, there are two possible definitions, and a choice between them is an orientation of the space. Real vector spaces, Euclidean spaces, and spheres are orientable. A space is non-orientable if "clockwise" is changed into "counterclockwise" after running through some loops in it, and coming back to the starting point. This means that a geometric shape, such as , that moves continuously along such a loop is changed into its own mirror image . A Möbius strip is an example of a non-orientable space.

In mathematics, and particularly topology, a fiber bundle is a space that is locally a product space, but globally may have a different topological structure. Specifically, the similarity between a space and a product space is defined using a continuous surjective map, that in small regions of behaves just like a projection from corresponding regions of to The map called the projection or submersion of the bundle, is regarded as part of the structure of the bundle. The space is known as the total space of the fiber bundle, as the base space, and the fiber.

In mathematics, Pontryagin duality is a duality between locally compact abelian groups that allows generalizing Fourier transform to all such groups, which include the circle group, the finite abelian groups, and the additive group of the integers, the real numbers, and every finite-dimensional vector space over the reals or a p-adic field.

In mathematics, a submanifold of a manifold is a subset which itself has the structure of a manifold, and for which the inclusion map satisfies certain properties. There are different types of submanifolds depending on exactly which properties are required. Different authors often have different definitions.
In mathematics, an n-dimensional differential structure on a set M makes M into an n-dimensional differential manifold, which is a topological manifold with some additional structure that allows for differential calculus on the manifold. If M is already a topological manifold, it is required that the new topology be identical to the existing one.
In mathematics, a Killing vector field, named after Wilhelm Killing, is a vector field on a Riemannian manifold that preserves the metric. Killing fields are the infinitesimal generators of isometries; that is, flows generated by Killing fields are continuous isometries of the manifold. More simply, the flow generates a symmetry, in the sense that moving each point of an object the same distance in the direction of the Killing vector will not distort distances on the object.
In quantum field theory, the theta vacuum is the semi-classical vacuum state of non-abelian Yang–Mills theories specified by the vacuum angleθ that arises when the state is written as a superposition of an infinite set of topologically distinct vacuum states. The dynamical effects of the vacuum are captured in the Lagrangian formalism through the presence of a θ-term which in quantum chromodynamics leads to the fine tuning problem known as the strong CP problem. It was discovered in 1976 by Curtis Callan, Roger Dashen, and David Gross, and independently by Roman Jackiw and Claudio Rebbi.

In mathematics, a manifold is a topological space that locally resembles Euclidean space near each point. More precisely, an -dimensional manifold, or -manifold for short, is a topological space with the property that each point has a neighborhood that is homeomorphic to an open subset of -dimensional Euclidean space.
In topology, a branch of mathematics, a topological manifold is a topological space that locally resembles real n-dimensional Euclidean space. Topological manifolds are an important class of topological spaces, with applications throughout mathematics. All manifolds are topological manifolds by definition. Other types of manifolds are formed by adding structure to a topological manifold. Every manifold has an "underlying" topological manifold, obtained by simply "forgetting" the added structure. However, not every topological manifold can be endowed with a particular additional structure. For example, the E8 manifold is a topological manifold which cannot be endowed with a differentiable structure.

In mathematics, a differentiable manifold is a type of manifold that is locally similar enough to a vector space to allow one to apply calculus. Any manifold can be described by a collection of charts (atlas). One may then apply ideas from calculus while working within the individual charts, since each chart lies within a vector space to which the usual rules of calculus apply. If the charts are suitably compatible, then computations done in one chart are valid in any other differentiable chart.
In mathematics, a Hilbert manifold is a manifold modeled on Hilbert spaces. Thus it is a separable Hausdorff space in which each point has a neighbourhood homeomorphic to an infinite dimensional Hilbert space. The concept of a Hilbert manifold provides a possibility of extending the theory of manifolds to infinite-dimensional setting. Analogously to the finite-dimensional situation, one can define a differentiable Hilbert manifold by considering a maximal atlas in which the transition maps are differentiable.
In differential geometry, normal coordinates at a point p in a differentiable manifold equipped with a symmetric affine connection are a local coordinate system in a neighborhood of p obtained by applying the exponential map to the tangent space at p. In a normal coordinate system, the Christoffel symbols of the connection vanish at the point p, thus often simplifying local calculations. In normal coordinates associated to the Levi-Civita connection of a Riemannian manifold, one can additionally arrange that the metric tensor is the Kronecker delta at the point p, and that the first partial derivatives of the metric at p vanish.
In gravitation theory, a world manifold endowed with some Lorentzian pseudo-Riemannian metric and an associated space-time structure is a space-time. Gravitation theory is formulated as classical field theory on natural bundles over a world manifold.
Lagrangian field theory is a formalism in classical field theory. It is the field-theoretic analogue of Lagrangian mechanics. Lagrangian mechanics is used to analyze the motion of a system of discrete particles each with a finite number of degrees of freedom. Lagrangian field theory applies to continua and fields, which have an infinite number of degrees of freedom.
In mathematics, the Poisson boundary is a measure space associated to a random walk. It is an object designed to encode the asymptotic behaviour of the random walk, i.e. how trajectories diverge when the number of steps goes to infinity. Despite being called a boundary it is in general a purely measure-theoretical object and not a boundary in the topological sense. However, in the case where the random walk is on a topological space the Poisson boundary can be related to the Martin boundary, which is an analytic construction yielding a genuine topological boundary. Both boundaries are related to harmonic functions on the space via generalisations of the Poisson formula.







