
A sphere is a geometrical object that is a three-dimensional analogue to a two-dimensional circle. Formally, a sphere is the set of points that are all at the same distance r from a given point in three-dimensional space. That given point is the center of the sphere, and r is the sphere's radius. The earliest known mentions of spheres appear in the work of the ancient Greek mathematicians.
In geometry, a pseudosphere is a surface with constant negative Gaussian curvature.

In mathematics, curvature is any of several strongly related concepts in geometry that intuitively measure the amount by which a curve deviates from being a straight line or by which a surface deviates from being a plane. If a curve or surface is contained in a larger space, curvature can be defined extrinsically relative to the ambient space. Curvature of Riemannian manifolds of dimension at least two can be defined intrinsically without reference to a larger space.
Elliptic geometry is an example of a geometry in which Euclid's parallel postulate does not hold. Instead, as in spherical geometry, there are no parallel lines since any two lines must intersect. However, unlike in spherical geometry, two lines are usually assumed to intersect at a single point. Because of this, the elliptic geometry described in this article is sometimes referred to as single elliptic geometry whereas spherical geometry is sometimes referred to as double elliptic geometry.

In mathematics, hyperbolic geometry is a non-Euclidean geometry. The parallel postulate of Euclidean geometry is replaced with:
In geometry, inversive geometry is the study of inversion, a transformation of the Euclidean plane that maps circles or lines to other circles or lines and that preserves the angles between crossing curves. Many difficult problems in geometry become much more tractable when an inversion is applied. Inversion seems to have been discovered by a number of people contemporaneously, including Steiner (1824), Quetelet (1825), Bellavitis (1836), Stubbs and Ingram (1842–3) and Kelvin (1845).

In mathematics, hyperbolic space of dimension n is the unique simply connected, n-dimensional Riemannian manifold of constant sectional curvature equal to −1. It is homogeneous, and satisfies the stronger property of being a symmetric space. There are many ways to construct it as an open subset of with an explicitly written Riemannian metric; such constructions are referred to as models. Hyperbolic 2-space, H2, which was the first instance studied, is also called the hyperbolic plane.

In geometry, Descartes' theorem states that for every four kissing, or mutually tangent, circles, the radii of the circles satisfy a certain quadratic equation. By solving this equation, one can construct a fourth circle tangent to three given, mutually tangent circles. The theorem is named after René Descartes, who stated it in 1643.

Eugenio Beltrami was an Italian mathematician notable for his work concerning differential geometry and mathematical physics. His work was noted especially for clarity of exposition. He was the first to prove consistency of non-Euclidean geometry by modeling it on a surface of constant curvature, the pseudosphere, and in the interior of an n-dimensional unit sphere, the so-called Beltrami–Klein model. He also developed singular value decomposition for matrices, which has been subsequently rediscovered several times. Beltrami's use of differential calculus for problems of mathematical physics indirectly influenced development of tensor calculus by Gregorio Ricci-Curbastro and Tullio Levi-Civita.
In geometry, hyperbolic motions are isometric automorphisms of a hyperbolic space. Under composition of mappings, the hyperbolic motions form a continuous group. This group is said to characterize the hyperbolic space. Such an approach to geometry was cultivated by Felix Klein in his Erlangen program. The idea of reducing geometry to its characteristic group was developed particularly by Mario Pieri in his reduction of the primitive notions of geometry to merely point and motion.
In mathematics, constant curvature is a concept from differential geometry. Here, curvature refers to the sectional curvature of a space and is a single number determining its local geometry. The sectional curvature is said to be constant if it has the same value at every point and for every two-dimensional tangent plane at that point. For example, a sphere is a surface of constant positive curvature.

In geometry, the Beltrami–Klein model, also called the projective model, Klein disk model, and the Cayley–Klein model, is a model of hyperbolic geometry in which points are represented by the points in the interior of the unit disk and lines are represented by the chords, straight line segments with ideal endpoints on the boundary sphere.
In hyperbolic geometry, an ideal point, omega point or point at infinity is a well-defined point outside the hyperbolic plane or space. Given a line l and a point P not on l, right- and left-limiting parallels to l through P converge to l at ideal points.
Geometry is a branch of mathematics concerned with questions of shape, size, relative position of figures, and the properties of space. Geometry is one of the oldest mathematical sciences.

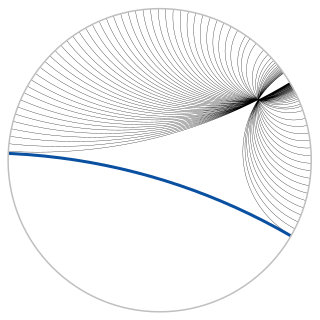
In hyperbolic geometry, a horocycle, sometimes called an oricycle or limit circle, is a curve of constant curvature where all the perpendicular geodesics ( normals) through a point on a horocycle are limiting parallel, and all converge asymptotically to a single ideal point called the centre of the horocycle. In some models of hyperbolic geometry it looks like the two "ends" of a horocycle get closer and closer to each other and closer to its centre, this is not true; the two "ends" of a horocycle get further and further away from each other and stay at an infinite distance off its centre. The horosphere is the 3 dimensional version of a horocycle

Lie sphere geometry is a geometrical theory of planar or spatial geometry in which the fundamental concept is the circle or sphere. It was introduced by Sophus Lie in the nineteenth century. The main idea which leads to Lie sphere geometry is that lines should be regarded as circles of infinite radius and that points in the plane should be regarded as circles of zero radius.
In mathematics, a plane is a two-dimensional space or flat surface that extends indefinitely. A plane is the two-dimensional analogue of a point, a line and three-dimensional space. When working exclusively in two-dimensional Euclidean space, the definite article is used, so the Euclidean plane refers to the whole space.
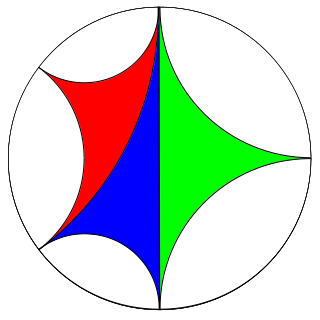
In geometry, the Poincaré disk model, also called the conformal disk model, is a model of 2-dimensional hyperbolic geometry in which all points are inside the unit disk, and straight lines are either circular arcs contained within the disk that are orthogonal to the unit circle or diameters of the unit circle.
In mathematics and theoretical physics, a quasi-sphere is a generalization of the hypersphere and the hyperplane to the context of a pseudo-Euclidean space. It may be described as the set of points for which the quadratic form for the space applied to the displacement vector from a centre point is a constant value, with the inclusion of hyperplanes as a limiting case.

