
A lander is a spacecraft which descends toward and comes to rest on the surface of an astronomical body. By contrast with an impact probe, which makes a hard landing and is damaged or destroyed so ceases to function after reaching the surface, a lander makes a soft landing after which the probe remains functional.
The space program of the People's Republic of China is directed by the China National Space Administration (CNSA). Its technological roots can be traced back to the late 1950s, when China began a ballistic missile program in response to perceived American threats. However, the first Chinese crewed space program only began several decades later, when an accelerated program of technological development culminated in Yang Liwei's successful 2003 flight aboard Shenzhou 5. This achievement made China the third country to independently send humans into space. Plans currently include a permanent Chinese space station in 2020 and crewed expeditions to the Moon.

A Mars rover is a motor vehicle that travels across the surface of the planet Mars upon arrival. Rovers have several advantages over stationary landers: they examine more territory, they can be directed to interesting features, they can place themselves in sunny positions to weather winter months, and they can advance the knowledge of how to perform very remote robotic vehicle control.

The planet Mars has been explored remotely by spacecraft. Probes sent from Earth, beginning in the late 20th century, have yielded a large increase in knowledge about the Martian system, focused primarily on understanding its geology and habitability potential. Engineering interplanetary journeys is complicated and the exploration of Mars has experienced a high failure rate, especially the early attempts. Roughly sixty percent of all spacecraft destined for Mars failed before completing their missions and some failed before their observations could begin. Some missions have met with unexpected success, such as the twin Mars Exploration Rovers, which operated for years beyond their specification.
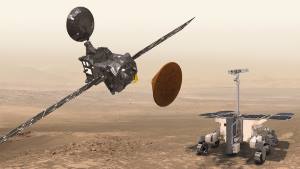
ExoMars is an astrobiology programme by the European Space Agency (ESA) and the Russian space agency Roscosmos.

A Mars Sample-Return (MSR) mission would be a spaceflight mission to collect rock and dust samples on Mars and then return them to Earth. Sample-return would be a very powerful type of exploration, because the analysis is freed from the time, budget, and space constraints of spacecraft sensors.

The Chinese Lunar Exploration Program, also known as the Chang'e Project after the Chinese moon goddess Chang'e, is an ongoing series of robotic Moon missions by the China National Space Administration (CNSA). The program incorporates lunar orbiters, landers, rovers and sample return spacecraft, launched using Long March rockets. Launches and flights are monitored by a Telemetry, Tracking, and Command (TT&C) system, which uses 50-metre (160-foot) radio antennas in Beijing and 40-metre (130-foot) antennas in Kunming, Shanghai, and Ürümqi to form a 3,000-kilometre (1,900-mile) VLBI antenna. A proprietary ground application system is responsible for downlink data reception.

A rover is a planetary surface exploration device designed to move across the solid surface on a planet or other planetary mass celestial bodies. Some rovers have been designed as land vehicles to transport members of a human spaceflight crew; others have been partially or fully autonomous robots. Rovers are typically created to land on another planet via a lander-style spacecraft, tasked to collect information about the terrain, and to take crust samples such as dust, soil, rocks, and even liquids. They are essential tools in space exploration.

A Mars landing is a landing of a spacecraft on the surface of Mars. Of multiple attempted Mars landings by robotic, unmanned spacecraft, nine have successful soft landed. There have also been studies for a possible human mission to Mars, including a landing, but none have been attempted. The most recent landing took place on 26 November 2018 by the NASA probe InSight.
Several Asian countries have space programs and are actively competing to achieve scientific and technological advancements in space, a situation sometimes referred to as the Asian space race in the popular media as a reference to the earlier Space Race between the United States and the Soviet Union. Like the previous space race, issues involved in the current push to space include national security, which has spurred many countries to send artificial satellites as well as humans into Earth orbit and beyond. A number of Asian countries are seen as contenders in the ongoing race to be the pre-eminent power in space.

Northern Light was a concept mission for a robotic mission to Mars that would consist of a lander and a rover, being studied by a consortium of Canadian universities, companies and organisations. The primary contractor for the spacecraft was Thoth Technology Inc.

Rosalind Franklin, previously known as the ExoMars rover, is a planned robotic Mars rover, part of the international ExoMars programme led by the European Space Agency and the Russian Roscosmos State Corporation. The mission was scheduled to launch in July 2020, then postponed to 2022.

Chang'e 4 is a robotic spacecraft mission, part of the second phase of the Chinese Lunar Exploration Program. It achieved humanity's first soft landing on the far side of the Moon, on 3 January 2019.
MELOS is a Japanese rover mission concept under study for an engineering demonstration of precision landing, and to look for possible biosignatures on Mars using a rover. JAXA has not published updates since 2015.

Yutu was a robotic lunar rover that formed part of the Chinese Chang'e 3 mission to the Moon. It was launched at 17:30 UTC on 1 December 2013, and reached the Moon's surface on 14 December 2013. The mission marks the first soft landing on the Moon since 1976 and the first rover to operate there since the Soviet Lunokhod 2 ceased operations on 11 May 1973.
The future of space exploration involves both telescopic exploration and the physical exploration of space by robotic spacecraft and human spaceflight.

The Martian Moons Exploration (MMX) is a robotic space probe set for launch in 2024 to bring back the first samples from Mars' largest moon Phobos. Developed by the Japanese Aerospace Exploration Agency (JAXA) and announced on 9 June 2015, MMX will land and collect samples from Phobos once or twice, along with conducting Deimos flyby observations and monitoring Mars' climate.
WISDOM is a ground-penetrating radar that is part of the science payload on board the European Space Agency'sRosalind Franklin rover, tasked to search for biosignatures and biomarkers on Mars. The rover is planned to be launched in August–October 2022 and land on Mars in spring 2023.
Yutu-2 is a robotic lunar rover that formed part of the Chinese Chang'e 4 mission to the Moon. It was launched on 7 December 2018, 18:23 UTC. It entered lunar orbit on 12 December 2018, before landing on the Moon's far side on 3 January 2019.




