
A lander is a spacecraft that descends towards, then comes to rest on the surface of an astronomical body other than Earth. In contrast to an impact probe, which makes a hard landing that damages or destroys the probe upon reaching the surface, a lander makes a soft landing after which the probe remains functional.

SMART-1 was a Swedish-designed European Space Agency satellite that orbited the Moon. It was launched on 27 September 2003 at 23:14 UTC from the Guiana Space Centre in Kourou, French Guiana. "SMART-1" stands for Small Missions for Advanced Research in Technology-1. On 3 September 2006, SMART-1 was deliberately crashed into the Moon's surface, ending its mission.
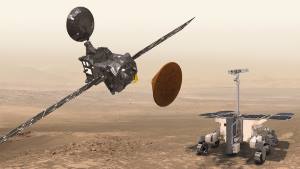
ExoMars is an astrobiology programme of the European Space Agency (ESA) and the Russian space agency (Roscosmos).

A lunar lander or Moon lander is a spacecraft designed to land on the surface of the Moon. As of 2023, the Apollo Lunar Module is the only lunar lander to have ever been used in human spaceflight, completing six lunar landings from 1969 to 1972 during the United States' Apollo Program. Several robotic landers have reached the surface, and some have returned samples to Earth.

The physical exploration of the Moon began when Luna 2, a space probe launched by the Soviet Union, made an impact on the surface of the Moon on September 14, 1959. Prior to that the only available means of exploration had been observation from Earth. The invention of the optical telescope brought about the first leap in the quality of lunar observations. Galileo Galilei is generally credited as the first person to use a telescope for astronomical purposes; having made his own telescope in 1609, the mountains and craters on the lunar surface were among his first observations using it.

Chandrayaan-2, is the second lunar exploration mission developed by the Indian Space Research Organisation (ISRO), after Chandrayaan-1. It consists of a lunar orbiter, and formerly included the Vikram lander and the Pragyan rover, all of which were developed in India. The main scientific objective is to map and study the variations in lunar surface composition, as well as the location and abundance of lunar water.
Planetary Transportation Systems (PTS), formerly known as PTScientists and Part-Time Scientists, is a Berlin-based aerospace company. They developed the robotic lunar lander "ALINA" and seek to land on the Moon with it. They became the first German team to officially enter the Google Lunar X-Prize competition on June 24, 2009, but failed to reach the finals in 2017 for lack of a launch contract. During the summer of 2019, the company filed for bankruptcy, and the ALINA project was put on hold. In July 2021, PTS was selected with ArianeGroup to build ESA's ASTRIS kick-stage.

The Chandrayaan programme also known as the Indian Lunar Exploration Programme is an ongoing series of outer space missions by the Indian Space Research Organization (ISRO) for the exploration of the Moon. The program incorporates a lunar orbiter, an impactor, a soft lander and a rover spacecraft.

Lunar Flashlight was a low-cost CubeSat lunar orbiter mission to explore, locate, and estimate size and composition of water ice deposits on the Moon for future exploitation by robots or humans.
Phootprint is a proposed sample-return mission to the Mars moon Phobos by the European Space Agency (ESA), proposed to be launched in 2024.

Schiaparelli EDM was a failed Entry, Descent, and Landing Demonstrator Module (EDM) of the ExoMars programme—a joint mission of the European Space Agency (ESA) and the Russian Space Agency Roscosmos. It was built in Italy and was intended to test technology for future soft landings on the surface of Mars. It also had a limited but focused science payload that would have measured atmospheric electricity on Mars and local meteorological conditions.

ArgoMoon is a CubeSat that was launched into a heliocentric orbit on Artemis 1, the maiden flight of the Space Launch System, on 16 November 2022 at 06:47:44 UTC. The objective of the ArgoMoon spacecraft is to take detailed images of the Interim Cryogenic Propulsion Stage following Orion separation, an operation that will demonstrate the ability of a cubesat to conduct precise proximity maneuvers in deep space. ASI has not confirmed nor denied whether this took place, but several images of the Earth and the Moon were taken.

OMOTENASHI was a small spacecraft and semi-hard lander of the 6U CubeSat format intended to demonstrate low-cost technology to land and explore the lunar surface. The CubeSat was to take measurements of the radiation environment near the Moon as well as on the lunar surface. Omotenashi is a Japanese word for "welcome" or "Hospitality".

Luna 26 is a planned lunar polar orbiter, part of the Luna-Glob program, by Roscosmos. In addition to its scientific role, the Luna 26 orbiter would also function as a telecomm relay between Earth and Russian landed assets. This mission was announced in November 2014, and its launch is planned for 2027 on a Soyuz-2.1b launch vehicle.

Commercial Lunar Payload Services (CLPS) is a NASA program to contract transportation services able to send small robotic landers and rovers to the Moon's south polar region mostly with the goals of scouting for lunar resources, testing in situ resource utilization (ISRU) concepts, and performing lunar science to support the Artemis lunar program. CLPS is intended to buy end-to-end payload services between Earth and the lunar surface using fixed priced contracts. The program was extended to add support for large payloads starting after 2025.

The Korea Pathfinder Lunar Orbiter (KPLO), officially Danuri, is South Korea's first lunar orbiter. The orbiter, its science payload and ground control infrastructure are technology demonstrators. The orbiter will also be tasked with surveying lunar resources such as water ice, uranium, helium-3, silicon, and aluminium, and produce a topographic map to help select future lunar landing sites.
HERACLES is a planned robotic transport system to and from the Moon by Europe (ESA), Japan (JAXA) and Canada (CSA) that will feature a lander called the European Large Logistic Lander, a Lunar Ascent Element, and a rover. The lander can be configured for different operations such as up to 1.5 tons of cargo delivery, sample-returns, or prospecting resources found on the Moon.
The Commercial Lunar Mission Support Services (CLMSS), also called Lunar Mission Support Services (LMSS) is a collaboration between Surrey Satellite Technology Ltd (SSTL) and the European Space Agency (ESA) to develop lunar telecommunications and navigation infrastructure to support lunar scientific and economic development.
Chang'e 7 is a planned robotic Chinese lunar exploration mission expected to be launched in 2026 to target the lunar south pole. Like its predecessors, the spacecraft is named after the Chinese moon goddess Chang'e. The mission will include an orbiter, a lander, a mini-hopping probe, and a rover.

![Lunar Lander dimensions [mm] with astronaut as size comparison LLConfiguration.jpg](http://upload.wikimedia.org/wikipedia/en/thumb/a/aa/LLConfiguration.jpg/220px-LLConfiguration.jpg)