In geometry, a cross-polytope,[1]hyperoctahedron, orthoplex,[2]staurotope,[3] or cocube is a regular, convex polytope that exists in n-dimensional Euclidean space. A 2-dimensional cross-polytope is a square, a 3-dimensional cross-polytope is a regular octahedron, and a 4-dimensional cross-polytope is a 16-cell. Its facets are simplexes of the previous dimension, while the cross-polytope's vertex figure is another cross-polytope from the previous dimension.
The vertices of a cross-polytope can be chosen as the unit vectors pointing along each co-ordinate axis – i.e. all the permutations of (±1, 0, 0, ..., 0). The cross-polytope is the convex hull of its vertices. The n-dimensional cross-polytope can also be defined as the closed unit ball (or, according to some authors, its boundary) in the ℓ1-norm on Rn, those points x = (x1, x2..., xn) satisfying
An n-orthoplex can be constructed as a bipyramid with an (n−1)-orthoplex base.
In 1 dimension the cross-polytope is a line segment, which can be chosen as the interval [−1, +1].
In 2 dimensions the cross-polytope is a square. If the vertices are chosen as {(±1, 0), (0, ±1)}, the square's sides are at right angles to the axes; in this orientation a square is often called a diamond.
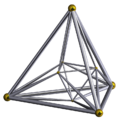
The 4-dimensional cross-polytope also goes by the name hexadecachoron or 16-cell. It is one of the six convex regular 4-polytopes. These 4-polytopes were first described by the Swiss mathematician Ludwig Schläfli in the mid-19th century. The vertices of the 4-dimensional hypercube, or tesseract, can be divided into two sets of eight, the convex hull of each set forming a cross-polytope. Moreover, the polytope known as the 24-cell can be constructed by symmetrically arranging three cross-polytopes.[5]
The n-dimensional cross-polytope has 2n vertices, and 2n facets ((n−1)-dimensional components) all of which are (n−1)-simplices. The vertex figures are all (n−1)-cross-polytopes. The Schläfli symbol of the cross-polytope is {3,3,...,3,4}.
The dihedral angle of the n-dimensional cross-polytope is . This gives: δ2 = arccos(0/2) = 90°, δ3 = arccos(−1/3) = 109.47°, δ4 = arccos(−2/4) = 120°, δ5 = arccos(−3/5) = 126.87°, ... δ∞ = arccos(−1) = 180°.
The hypervolume of the n-dimensional cross-polytope is
For each pair of non-opposite vertices, there is an edge joining them. More generally, each set of k+1 orthogonal vertices corresponds to a distinct k-dimensional component which contains them. The number of k-dimensional components (vertices, edges, faces, ..., facets) in an n-dimensional cross-polytope is thus given by (see binomial coefficient):
The extended f-vector for an n-orthoplex can be computed by (1,2)n, like the coefficients of polynomial products. For example a 16-cell is (1,2)4 = (1,4,4)2 = (1,8,24,32,16).
There are many possible orthographic projections that can show the cross-polytopes as 2-dimensional graphs. Petrie polygon projections map the points into a regular 2n-gon or lower order regular polygons. A second projection takes the 2(n−1)-gon petrie polygon of the lower dimension, seen as a bipyramid, projected down the axis, with 2 vertices mapped into the center.
Regular complex polytopes can be defined in complexHilbert space called generalized orthoplexes (or cross polytopes), βp n = 2{3}2{3}...2{4}p, or ... Real solutions exist with p = 2, i.e. β2 n = βn = 2{3}2{3}...2{4}2 = {3,3,..,4}. For p > 2, they exist in . A p-generalized n-orthoplex has pn vertices. Generalized orthoplexes have regular simplexes (real) as facets.[9] Generalized orthoplexes make complete multipartite graphs, βp 2 make Kp,p for complete bipartite graph, βp 3 make Kp,p,p for complete tripartite graphs βp n creates Kpn or Turán graphs. An orthogonal projection can be defined that maps all the vertices equally-spaced on a circle, with all pairs of vertices connected, except multiples of n. The regular polygon perimeter in these orthogonal projections is called a petrie polygon.
↑ Conway, J. H.; Sloane, N. J. A. (1991). "The Cell Structures of Certain Lattices". In Hilton, P.; Hirzebruch, F.; Remmert, R. (eds.). Miscellanea Mathematica. Berlin: Springer. pp.89–90. doi:10.1007/978-3-642-76709-8_5. ISBN978-3-642-76711-1.
↑ Guy, Richard K. (1983), "An olla-podrida of open problems, often oddly posed", American Mathematical Monthly, 90 (3): 196–200, doi:10.2307/2975549, JSTOR2975549 .
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.