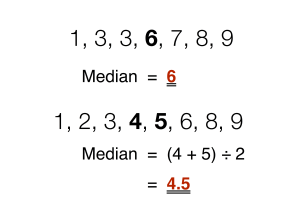
Finding the median in sets of data with an odd and even number of values
The median of a set of numbers is the value separating the higher half from the lower half of a data sample, a population, or a probability distribution. For a data set, it may be thought of as "the middle" value. The basic feature of the median in describing data compared to the mean (often simply described as the "average") is that it is not skewed by a small proportion of extremely large or small values, and therefore provides a better representation of the center. Median income, for example, may be a better way to describe the center of the income distribution because increases in the largest incomes alone have no effect on the median. For this reason, the median is of central importance in robust statistics.
The median of a finite list of numbers is the "middle" number, when those numbers are listed in order from smallest to greatest.
If the data set has an odd number of observations, the middle one is selected. For example, the following list of seven numbers,
1, 3, 3, 6, 7, 8, 9
has the median of 6, which is the fourth value.
If the data set has an even number of observations, there is no distinct middle value and the median is usually defined to be the arithmetic mean of the two middle values.[1][2] For example, this data set of 8 numbers
1, 2, 3, 4, 5, 6, 8, 9
has a median value of 4.5, that is . (In more technical terms, this interprets the median as the fully trimmedmid-range).
In general, with this convention, the median can be defined as follows: For a data set of elements, ordered from smallest to greatest,
if is odd,
if is even,
Comparison of common averages of values [ 1, 2, 2, 3, 4, 7, 9 ]
Formally, a median of a population is any value such that at least half of the population is less than or equal to the proposed median and at least half is greater than or equal to the proposed median. As seen above, medians may not be unique. If each set contains more than half the population, then some of the population is exactly equal to the unique median.
The median is well-defined for any ordered (one-dimensional) data and is independent of any distance metric. The median can thus be applied to school classes which are ranked but not numerical (e.g. working out a median grade when student test scores are graded from F to A), although the result might be halfway between classes if there is an even number of classes. (For odd number classes, one specific class is determined as the median.)
A geometric median, on the other hand, is defined in any number of dimensions. A related concept, in which the outcome is forced to correspond to a member of the sample, is the medoid.
There is no widely accepted standard notation for the median, but some authors represent the median of a variable x as med(x), x͂,[3] as μ1/2,[1] or as M.[3][4] In any of these cases, the use of these or other symbols for the median needs to be explicitly defined when they are introduced.
The median can be used as a measure of location when one attaches reduced importance to extreme values, typically because a distribution is skewed, extreme values are not known, or outliers are untrustworthy, i.e., may be measurement/transcription errors.
The median is 2 in this case, as is the mode, and it might be seen as a better indication of the center than the arithmetic mean of 4, which is larger than all but one of the values. However, the widely cited empirical relationship that the mean is shifted "further into the tail" of a distribution than the median is not generally true. At most, one can say that the two statistics cannot be "too far" apart; see §Inequality relating means and medians below.[5]
As a median is based on the middle data in a set, it is not necessary to know the value of extreme results in order to calculate it. For example, in a psychology test investigating the time needed to solve a problem, if a small number of people failed to solve the problem at all in the given time a median can still be calculated.[6]
For practical purposes, different measures of location and dispersion are often compared on the basis of how well the corresponding population values can be estimated from a sample of data. The median, estimated using the sample median, has good properties in this regard. While it is not usually optimal if a given population distribution is assumed, its properties are always reasonably good. For example, a comparison of the efficiency of candidate estimators shows that the sample mean is more statistically efficient when—and only when— data is uncontaminated by data from heavy-tailed distributions or from mixtures of distributions.[citation needed] Even then, the median has a 64% efficiency compared to the minimum-variance mean (for large normal samples), which is to say the variance of the median will be ~50% greater than the variance of the mean.[7][8]
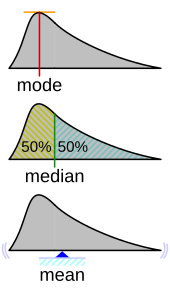
Probability distributions
Geometric visualization of the mode, median and mean of an arbitrary probability density function
Any probability distribution on the real number set has at least one median, but in pathological cases there may be more than one median: if F is constant 1/2 on an interval (so that f = 0 there), then any value of that interval is a median.
Medians of particular distributions
The medians of certain types of distributions can be easily calculated from their parameters; furthermore, they exist even for some distributions lacking a well-defined mean, such as the Cauchy distribution:
Provided that the probability distribution of X is such that the above expectation exists, then m is a median of X if and only if m is a minimizer of the mean absolute error with respect to X.[11] In particular, if m is a sample median, then it minimizes the arithmetic mean of the absolute deviations.[12] Note, however, that in cases where the sample contains an even number of elements, this minimizer is not unique.
More generally, a median is defined as a minimum of
If the distribution has finite variance, then the distance between the median and the mean is bounded by one standard deviation.
This bound was proved by Book and Sher in 1979 for discrete samples,[13] and more generally by Page and Murty in 1982.[14] In a comment on a subsequent proof by O'Cinneide,[15] Mallows in 1991 presented a compact proof that uses Jensen's inequality twice,[16] as follows. Using |·| for the absolute value, we have
The first and third inequalities come from Jensen's inequality applied to the absolute-value function and the square function, which are each convex. The second inequality comes from the fact that a median minimizes the absolute deviation function .
Mallows's proof can be generalized to obtain a multivariate version of the inequality[17] simply by replacing the absolute value with a norm:
where m is a spatial median, that is, a minimizer of the function The spatial median is unique when the data-set's dimension is two or more.[18][19]
A similar relation holds between the median and the mode:
Jensen's inequality for medians
Jensen's inequality states that for any random variable X with a finite expectation E[X] and for any convex function f
This inequality generalizes to the median as well. We say a function f: R→R is a C function if, for any t,
is a closed interval (allowing the degenerate cases of a single point or an empty set). Every convex function is a C function, but the reverse does not hold. If f is a C function, then
If the medians are not unique, the statement holds for the corresponding suprema.[22]
Medians for samples
This section discusses the theory of estimating a population median from a sample. To calculate the median of a sample "by hand," see §Finite data set of numbers above.
Selection algorithms still have the downside of requiring Ω(n) memory, that is, they need to have the full sample (or a linear-sized portion of it) in memory. Because this, as well as the linear time requirement, can be prohibitive, several estimation procedures for the median have been developed. A simple one is the median of three rule, which estimates the median as the median of a three-element subsample; this is commonly used as a subroutine in the quicksort sorting algorithm, which uses an estimate of its input's median. A more robust estimator is Tukey's ninther, which is the median of three rule applied with limited recursion:[24] if A is the sample laid out as an array, and
The remedian is an estimator for the median that requires linear time but sub-linear memory, operating in a single pass over the sample.[25]
Sampling distribution
The distributions of both the sample mean and the sample median were determined by Laplace.[26] The distribution of the sample median from a population with a density function is asymptotically normal with mean and variance[27]
We take the sample size to be an odd number and assume our variable continuous; the formula for the case of discrete variables is given below in §Empirical local density. The sample can be summarized as "below median", "at median", and "above median", which corresponds to a trinomial distribution with probabilities , and . For a continuous variable, the probability of multiple sample values being exactly equal to the median is 0, so one can calculate the density of at the point directly from the trinomial distribution:
.
Now we introduce the beta function. For integer arguments and , this can be expressed as . Also, recall that . Using these relationships and setting both and equal to allows the last expression to be written as
Hence the density function of the median is a symmetric beta distribution pushed forward by . Its mean, as we would expect, is 0.5 and its variance is . By the chain rule, the corresponding variance of the sample median is
In practice, the functions and above are often not known or assumed. However, they can be estimated from an observed frequency distribution. In this section, we give an example. Consider the following table, representing a sample of 3,800 (discrete-valued) observations:
v
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
f(v)
0.000
0.008
0.010
0.013
0.083
0.108
0.328
0.220
0.202
0.023
0.005
F(v)
0.000
0.008
0.018
0.031
0.114
0.222
0.550
0.770
0.972
0.995
1.000
Because the observations are discrete-valued, constructing the exact distribution of the median is not an immediate translation of the above expression for ; one may (and typically does) have multiple instances of the median in one's sample. So we must sum over all these possibilities:
Here, i is the number of points strictly less than the median and k the number strictly greater.
Using these preliminaries, it is possible to investigate the effect of sample size on the standard errors of the mean and median. The observed mean is 3.16, the observed raw median is 3 and the observed interpolated median is 3.174. The following table gives some comparison statistics.
Sample size
Statistic
3
9
15
21
Expected value of median
3.198
3.191
3.174
3.161
Standard error of median (above formula)
0.482
0.305
0.257
0.239
Standard error of median (asymptotic approximation)
0.879
0.508
0.393
0.332
Standard error of mean
0.421
0.243
0.188
0.159
The expected value of the median falls slightly as sample size increases while, as would be expected, the standard errors of both the median and the mean are proportionate to the inverse square root of the sample size. The asymptotic approximation errs on the side of caution by overestimating the standard error.
Estimation of variance from sample data
The value of —the asymptotic value of where is the population median—has been studied by several authors. The standard "delete one" jackknife method produces inconsistent results.[28] An alternative—the "delete k" method—where grows with the sample size has been shown to be asymptotically consistent.[29] This method may be computationally expensive for large data sets. A bootstrap estimate is known to be consistent,[30] but converges very slowly (order of ).[31] Other methods have been proposed but their behavior may differ between large and small samples.[32]
Efficiency
The efficiency of the sample median, measured as the ratio of the variance of the mean to the variance of the median, depends on the sample size and on the underlying population distribution. For a sample of size from the normal distribution, the efficiency for large N is
The efficiency tends to as tends to infinity.
In other words, the relative variance of the median will be , or 57% greater than the variance of the mean – the relative standard error of the median will be , or 25% greater than the standard error of the mean, (see also section #Sampling distribution above.).[33]
If data is represented by a statistical model specifying a particular family of probability distributions, then estimates of the median can be obtained by fitting that family of probability distributions to the data and calculating the theoretical median of the fitted distribution.[citation needed]Pareto interpolation is an application of this when the population is assumed to have a Pareto distribution.
Multivariate median
Previously, this article discussed the univariate median, when the sample or population had one-dimension. When the dimension is two or higher, there are multiple concepts that extend the definition of the univariate median; each such multivariate median agrees with the univariate median when the dimension is exactly one.[34][35][36][37]
Marginal median
The marginal median is defined for vectors defined with respect to a fixed set of coordinates. A marginal median is defined to be the vector whose components are univariate medians. The marginal median is easy to compute, and its properties were studied by Puri and Sen.[34][38]
Geometric median
The geometric median of a discrete set of sample points in a Euclidean space is the[lower-alpha 1] point minimizing the sum of distances to the sample points.
If the marginal medians for all coordinate systems coincide, then their common location may be termed the "median in all directions".[40] This concept is relevant to voting theory on account of the median voter theorem. When it exists, the median in all directions coincides with the geometric median (at least for discrete distributions).
In statistics and computational geometry, the notion of centerpoint is a generalization of the median to data in higher-dimensional Euclidean space. Given a set of points in d-dimensional space, a centerpoint of the set is a point such that any hyperplane that goes through that point divides the set of points in two roughly equal subsets: the smaller part should have at least a 1/(d+1) fraction of the points. Like the median, a centerpoint need not be one of the data points. Every non-empty set of points (with no duplicates) has at least one centerpoint.
Other median-related concepts
Interpolated median
When dealing with a discrete variable, it is sometimes useful to regard the observed values as being midpoints of underlying continuous intervals. An example of this is a Likert scale, on which opinions or preferences are expressed on a scale with a set number of possible responses. If the scale consists of the positive integers, an observation of 3 might be regarded as representing the interval from 2.50 to 3.50. It is possible to estimate the median of the underlying variable. If, say, 22% of the observations are of value 2 or below and 55.0% are of 3 or below (so 33% have the value 3), then the median is 3 since the median is the smallest value of for which is greater than a half. But the interpolated median is somewhere between 2.50 and 3.50. First we add half of the interval width to the median to get the upper bound of the median interval. Then we subtract that proportion of the interval width which equals the proportion of the 33% which lies above the 50% mark. In other words, we split up the interval width pro rata to the numbers of observations. In this case, the 33% is split into 28% below the median and 5% above it so we subtract 5/33 of the interval width from the upper bound of 3.50 to give an interpolated median of 3.35. More formally, if the values are known, the interpolated median can be calculated from
Alternatively, if in an observed sample there are scores above the median category, scores in it and scores below it then the interpolated median is given by
For univariate distributions that are symmetric about one median, the Hodges–Lehmann estimator is a robust and highly efficient estimator of the population median; for non-symmetric distributions, the Hodges–Lehmann estimator is a robust and highly efficient estimator of the population pseudo-median, which is the median of a symmetrized distribution and which is close to the population median.[41] The Hodges–Lehmann estimator has been generalized to multivariate distributions.[42]
In cluster analysis, the k-medians clustering algorithm provides a way of defining clusters, in which the criterion of maximising the distance between cluster-means that is used in k-means clustering, is replaced by maximising the distance between cluster-medians.
Median–median line
This is a method of robust regression. The idea dates back to Wald in 1940 who suggested dividing a set of bivariate data into two halves depending on the value of the independent parameter : a left half with values less than the median and a right half with values greater than the median.[44] He suggested taking the means of the dependent and independent variables of the left and the right halves and estimating the slope of the line joining these two points. The line could then be adjusted to fit the majority of the points in the data set.
Nair and Shrivastava in 1942 suggested a similar idea but instead advocated dividing the sample into three equal parts before calculating the means of the subsamples.[45] Brown and Mood in 1951 proposed the idea of using the medians of two subsamples rather the means.[46] Tukey combined these ideas and recommended dividing the sample into three equal size subsamples and estimating the line based on the medians of the subsamples.[47]
The theory of median-unbiased estimators was revived by George W. Brown in 1947:[48]
An estimate of a one-dimensional parameter θ will be said to be median-unbiased if, for fixed θ, the median of the distribution of the estimate is at the value θ; i.e., the estimate underestimates just as often as it overestimates. This requirement seems for most purposes to accomplish as much as the mean-unbiased requirement and has the additional property that it is invariant under one-to-one transformation.
There are methods of constructing median-unbiased estimators that are optimal (in a sense analogous to the minimum-variance property for mean-unbiased estimators). Such constructions exist for probability distributions having monotone likelihood-functions.[53][54] One such procedure is an analogue of the Rao–Blackwell procedure for mean-unbiased estimators: The procedure holds for a smaller class of probability distributions than does the Rao—Blackwell procedure but for a larger class of loss functions.[55]
History
Scientific researchers in the ancient near east appear not to have used summary statistics altogether, instead choosing values that offered maximal consistency with a broader theory that integrated a wide variety of phenomena.[56] Within the Mediterranean (and, later, European) scholarly community, statistics like the mean are fundamentally a medieval and early modern development. (The history of the median outside Europe and its predecessors remains relatively unstudied.)
The idea of the median appeared in the 6th century in the Talmud, in order to fairly analyze divergent appraisals.[57][58] However, the concept did not spread to the broader scientific community.
Instead, the closest ancestor of the modern median is the mid-range, invented by Al-Biruni[59]:31[60] Transmission of his work to later scholars is unclear. He applied his technique to assaying currency metals, but, after he published his work, most assayers still adopted the most unfavorable value from their results, lest they appear to cheat.[59]:35–8[61] However, increased navigation at sea during the Age of Discovery meant that ship's navigators increasingly had to attempt to determine latitude in unfavorable weather against hostile shores, leading to renewed interest in summary statistics. Whether rediscovered or independently invented, the mid-range is recommended to nautical navigators in Harriot's "Instructions for Raleigh's Voyage to Guiana, 1595".[59]:45–8
The idea of the median may have first appeared in Edward Wright's 1599 book Certaine Errors in Navigation on a section about compass navigation.[62] Wright was reluctant to discard measured values, and may have felt that the median — incorporating a greater proportion of the dataset than the mid-range — was more likely to be correct. However, Wright did not give examples of his technique's use, making it hard to verify that he described the modern notion of median.[56][60][lower-alpha 2] The median (in the context of probability) certainly appeared in the correspondence of Christiaan Huygens, but as an example of a statistic that was inappropriate for actuarial practice.[56]
The earliest recommendation of the median dates to 1757, when Roger Joseph Boscovich developed a regression method based on the L1 norm and therefore implicitly on the median.[56][63] In 1774, Laplace made this desire explicit: he suggested the median be used as the standard estimator of the value of a posterior PDF. The specific criterion was to minimize the expected magnitude of the error; where is the estimate and is the true value. To this end, Laplace determined the distributions of both the sample mean and the sample median in the early 1800s.[26][64] However, a decade later, Gauss and Legendre developed the least squares method, which minimizes to obtain the mean. Within the context of regression, Gauss and Legendre's innovation offers vastly easier computation. Consequently, Laplaces' proposal was generally rejected until the rise of computing devices 150 years later (and is still a relatively uncommon algorithm).[65]
Antoine Augustin Cournot in 1843 was the first[66] to use the term median (valeur médiane) for the value that divides a probability distribution into two equal halves. Gustav Theodor Fechner used the median (Centralwerth) in sociological and psychological phenomena.[67] It had earlier been used only in astronomy and related fields. Gustav Fechner popularized the median into the formal analysis of data, although it had been used previously by Laplace,[67] and the median appeared in a textbook by F. Y. Edgeworth.[68]Francis Galton used the English term median in 1881,[69][70] having earlier used the terms middle-most value in 1869, and the medium in 1880.[71][72]
Statisticians encouraged the use of medians intensely throughout the 19th century for its intuitive clarity. However, the notion of median does not lend itself to the theory of higher moments as well as the arithmetic mean does, and is much harder to compute. As a result, the median was steadily supplanted as a notion of generic average by the arithmetic mean during the 20th century.[56][60]
Median graph– Graph with a median for each three vertices
Median of medians– Fast approximate median algorithm – Algorithm to calculate the approximate median in linear time
Median search– Method for finding kth smallest valuePages displaying short descriptions of redirect targets
Median slope– Statistical method for fitting a linePages displaying short descriptions of redirect targets
Median voter theory– Theorem in political sciencePages displaying short descriptions of redirect targets
Medoid– representative objects of a data set or a cluster within a data set whose sum of dissimilarities to all the objects in the cluster is minimalPages displaying wikidata descriptions as a fallbacks – Generalization of the median in higher dimensions
↑ The geometric median is unique unless the sample is collinear.[39]
↑ Subsequent scholars appear to concur with Eisenhart that Boroughs' 1580 figures, while suggestive of the median, in fact describe an arithmetic mean.;[59]:62–3 Boroughs is mentioned in no other work.
Related Research Articles
The Cauchy distribution, named after Augustin Cauchy, is a continuous probability distribution. It is also known, especially among physicists, as the Lorentz distribution, Cauchy–Lorentz distribution, Lorentz(ian) function, or Breit–Wigner distribution. The Cauchy distribution is the distribution of the x-intercept of a ray issuing from with a uniformly distributed angle. It is also the distribution of the ratio of two independent normally distributed random variables with mean zero.
In statistics, an estimator is a rule for calculating an estimate of a given quantity based on observed data: thus the rule, the quantity of interest and its result are distinguished. For example, the sample mean is a commonly used estimator of the population mean.
In probability theory and statistics, kurtosis is a measure of the "tailedness" of the probability distribution of a real-valued random variable. Like skewness, kurtosis describes a particular aspect of a probability distribution. There are different ways to quantify kurtosis for a theoretical distribution, and there are corresponding ways of estimating it using a sample from a population. Different measures of kurtosis may have different interpretations.
In statistics, the standard deviation is a measure of the amount of variation of a random variable expected about its mean. A low standard deviation indicates that the values tend to be close to the mean of the set, while a high standard deviation indicates that the values are spread out over a wider range. The standard deviation is commonly used in the determination of what constitutes an outlier and what does not.
In probability theory and statistics, skewness is a measure of the asymmetry of the probability distribution of a real-valued random variable about its mean. The skewness value can be positive, zero, negative, or undefined.
In probability theory and statistics, variance is the expected value of the squared deviation from the mean of a random variable. The standard deviation (SD) is obtained as the square root of the variance. Variance is a measure of dispersion, meaning it is a measure of how far a set of numbers is spread out from their average value. It is the second central moment of a distribution, and the covariance of the random variable with itself, and it is often represented by , , , , or .
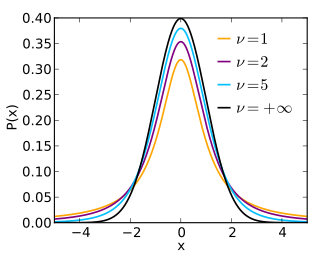
In probability and statistics, Student's t distribution is a continuous probability distribution that generalizes the standard normal distribution. Like the latter, it is symmetric around zero and bell-shaped.
In probability theory, Chebyshev's inequality provides an upper bound on the probability of deviation of a random variable from its mean. More specifically, the probability that a random variable deviates from its mean by more than is at most , where is any positive constant and is the standard deviation.
In statistics, the mean squared error (MSE) or mean squared deviation (MSD) of an estimator measures the average of the squares of the errors—that is, the average squared difference between the estimated values and the actual value. MSE is a risk function, corresponding to the expected value of the squared error loss. The fact that MSE is almost always strictly positive is because of randomness or because the estimator does not account for information that could produce a more accurate estimate. In machine learning, specifically empirical risk minimization, MSE may refer to the empirical risk, as an estimate of the true MSE.
The average absolute deviation (AAD) of a data set is the average of the absolute deviations from a central point. It is a summary statistic of statistical dispersion or variability. In the general form, the central point can be a mean, median, mode, or the result of any other measure of central tendency or any reference value related to the given data set. AAD includes the mean absolute deviation and the median absolute deviation.
In mathematics, the moments of a function are certain quantitative measures related to the shape of the function's graph. If the function represents mass density, then the zeroth moment is the total mass, the first moment is the center of mass, and the second moment is the moment of inertia. If the function is a probability distribution, then the first moment is the expected value, the second central moment is the variance, the third standardized moment is the skewness, and the fourth standardized moment is the kurtosis. The mathematical concept is closely related to the concept of moment in physics.
In statistics, the Rao–Blackwell theorem, sometimes referred to as the Rao–Blackwell–Kolmogorov theorem, is a result that characterizes the transformation of an arbitrarily crude estimator into an estimator that is optimal by the mean-squared-error criterion or any of a variety of similar criteria.
The standard error (SE) of a statistic is the standard deviation of its sampling distribution or an estimate of that standard deviation. If the statistic is the sample mean, it is called the standard error of the mean (SEM). The standard error is a key ingredient in producing confidence intervals.
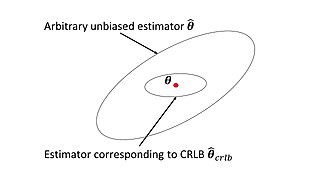
In estimation theory and statistics, the Cramér–Rao bound (CRB) relates to estimation of a deterministic parameter. The result is named in honor of Harald Cramér and C. R. Rao, but has also been derived independently by Maurice Fréchet, Georges Darmois, and by Alexander Aitken and Harold Silverstone. It is also known as Fréchet-Cramér–Rao or Fréchet-Darmois-Cramér-Rao lower bound. It states that the precision of any unbiased estimator is at most the Fisher information; or (equivalently) the reciprocal of the Fisher information is a lower bound on its variance.
In mathematical statistics, the Fisher information is a way of measuring the amount of information that an observable random variable X carries about an unknown parameter θ of a distribution that models X. Formally, it is the variance of the score, or the expected value of the observed information.
In statistics, a consistent estimator or asymptotically consistent estimator is an estimator—a rule for computing estimates of a parameter θ0—having the property that as the number of data points used increases indefinitely, the resulting sequence of estimates converges in probability to θ0. This means that the distributions of the estimates become more and more concentrated near the true value of the parameter being estimated, so that the probability of the estimator being arbitrarily close to θ0 converges to one.
In statistics a minimum-variance unbiased estimator (MVUE) or uniformly minimum-variance unbiased estimator (UMVUE) is an unbiased estimator that has lower variance than any other unbiased estimator for all possible values of the parameter.
In statistics, the mid-range or mid-extreme is a measure of central tendency of a sample defined as the arithmetic mean of the maximum and minimum values of the data set:
In statistics, the bias of an estimator is the difference between this estimator's expected value and the true value of the parameter being estimated. An estimator or decision rule with zero bias is called unbiased. In statistics, "bias" is an objective property of an estimator. Bias is a distinct concept from consistency: consistent estimators converge in probability to the true value of the parameter, but may be biased or unbiased; see bias versus consistency for more.
In statistics, efficiency is a measure of quality of an estimator, of an experimental design, or of a hypothesis testing procedure. Essentially, a more efficient estimator needs fewer input data or observations than a less efficient one to achieve the Cramér–Rao bound. An efficient estimator is characterized by having the smallest possible variance, indicating that there is a small deviance between the estimated value and the "true" value in the L2 norm sense.
↑ Mallows, Colin (August 1991). "Another comment on O'Cinneide". The American Statistician. 45 (3): 257. doi:10.1080/00031305.1991.10475815.
↑ Piché, Robert (2012). Random Vectors and Random Sequences. Lambert Academic Publishing. ISBN978-3659211966.
↑ Kemperman, Johannes H. B. (1987). Dodge, Yadolah (ed.). "The median of a finite measure on a Banach space: Statistical data analysis based on the L1-norm and related methods". Papers from the First International Conference Held at Neuchâtel, August 31–September 4, 1987. Amsterdam: North-Holland Publishing Co.: 217–230. MR0949228.
↑ Basu, S.; Dasgupta, A. (1997). "The Mean, Median, and Mode of Unimodal Distributions:A Characterization". Theory of Probability and Its Applications. 41 (2): 210–223. doi:10.1137/S0040585X97975447. S2CID54593178.
↑ Merkle, M. (2005). "Jensen's inequality for medians". Statistics & Probability Letters. 71 (3): 277–281. doi:10.1016/j.spl.2004.11.010.
1 2 3 Hettmansperger, Thomas P.; McKean, Joseph W. (1998). Robust nonparametric statistical methods. Kendall's Library of Statistics. Vol.5. London: Edward Arnold. ISBN0-340-54937-8. MR1604954.
↑ Small, Christopher G. "A survey of multidimensional medians." International Statistical Review/Revue Internationale de Statistique (1990): 263–277. doi:10.2307/1403809JSTOR1403809
↑ Niinimaa, A., and H. Oja. "Multivariate median." Encyclopedia of statistical sciences (1999).
↑ Mosler, Karl. Multivariate Dispersion, Central Regions, and Depth: The Lift Zonoid Approach. Vol. 165. Springer Science & Business Media, 2012.
↑ Puri, Madan L.; Sen, Pranab K.; Nonparametric Methods in Multivariate Analysis, John Wiley & Sons, New York, NY, 1971. (Reprinted by Krieger Publishing)
↑ Davis, Otto A.; DeGroot, Morris H.; Hinich, Melvin J. (January 1972). "Social Preference Orderings and Majority Rule"(PDF). Econometrica. 40 (1): 147–157. doi:10.2307/1909727. JSTOR1909727. The authors, working in a topic in which uniqueness is assumed, actually use the expression "unique median in all directions".
↑ Pratt, William K.; Cooper, Ted J.; Kabir, Ihtisham (1985-07-11). Corbett, Francis J (ed.). "Pseudomedian Filter". Architectures and Algorithms for Digital Image Processing II. 0534: 34. Bibcode:1985SPIE..534...34P. doi:10.1117/12.946562. S2CID173183609.
↑ Oja, Hannu (2010). Multivariate nonparametric methods withR: An approach based on spatial signs and ranks. Lecture Notes in Statistics. Vol.199. New York, NY: Springer. pp.xiv+232. doi:10.1007/978-1-4419-0468-3. ISBN978-1-4419-0467-6. MR2598854.
↑ Nair, K. R.; Shrivastava, M. P. (1942). "On a Simple Method of Curve Fitting". Sankhyā: The Indian Journal of Statistics. 6 (2): 121–132. JSTOR25047749.
↑ Brown, G. W.; Mood, A. M. (1951). "On Median Tests for Linear Hypotheses". Proc Second Berkeley Symposium on Mathematical Statistics and Probability. Berkeley, CA: University of California Press. pp.159–166. Zbl0045.08606.
↑ Adler, Dan (31 December 2014). "Talmud and Modern Economics". Jewish American and Israeli Issues. Archived from the original on 6 December 2015. Retrieved 22 February 2020.
↑ David, H. A. (1995). "First (?) Occurrence of Common Terms in Mathematical Statistics". The American Statistician. 49 (2): 121–133. doi:10.2307/2684625. ISSN0003-1305. JSTOR2684625.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.