Types of variable buoyancy systems

Top: Low volume, low buoyancy.
Bottom: High volume, high buoyancy state.
PV = Pressure vessel
Bi = Internal bellows
Bo = External bellows
P = pump
CV = Check valve
V = Valve

Top: Low volume, low buoyancy.
Bottom: High volume, high buoyancy state.
PV = Pressure vessel
Bo = External bellows
P = Piston
C = Cylinder
R = Piston rod
M = Motor

Left: Low internal pressure, pumped both ways.
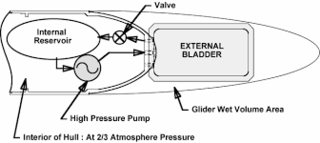
Right: High internal pressure, ballast ejected by internal gas pressure.
PV = Pressure vessel
LP = Low internal pressure
HP = High internal pressure
P = pump
CV = Check valve
IV = Inlet valve
OV = Outlet valve
Several types of variable buoyancy system have been used, and are briefly described here. Some are based on a relatively incompressible pressure vessel, and are nearly stable with variation of hydrostatic pressure.
- Ambient pressure buoyancy/ballast tanks (unstable with depth change), such as the main ballast tanks on a submarine, or an inflatable diver's buoyancy compensator [6] [4] These are not pressure vessels, as the contents are at ambient pressure.
- Weight discharge variable mass system. This is generally a system by which ballast of higher density than the surroundings is discharged, and once discharged the ballast is lost. The system is simple and appropriate for vehicles that only need to make a very limited number of buoyancy adjustments during a deployment.It is a common method of achieving positive buoyancy in an emergency as it is simple to arrange a fail-safe discharge mechanism. An analogous system for releasing fixed low density material is also possible. [10] : 21 These are also not pressure vessels as the weights or incompressible buoys are stored at ambient pressure.
- One-way tank flood variable mass system. This is simply an empty tank that can withstand external working pressure, and can be partly or completely flooded by a control valve. The tank can be drained again at the surface for subsequent dives, but not while under pressure during a dive. [10] : 24
- Pumped oil, constant mass, variable volume system. This method uses more power but is indefinitely repeatable while power lasts, as it does not discharge any consumables. A positive displacement pump transfers oil stored in a variable volume container inside a gas filled pressure vessel to an external variable volume container, incompressibly increasing the displaced volume of the vehicle. Return transfer may be by pressure difference controlled by a valve, or also pumped. [10] : 24
- Piston-driven oil, constant mass, variable volume system. This works very similarly to the pumped oil system, but the internal storage is in a cylinder with a piston which decreases or increases its volume using a mechanical drive, typically powered by an electric motor. In effect the piston acts as a pump. [10] : 25
- Pumped water variable buoyancy system. Ambient water is moved into and out of the pressure vessel to change the overall density of the vessel, and thereby of the vehicle of which it is a component. In one direction this transfer may be possible by pressure difference, but in at least one direction it must be pumped. The process is repeatable while power lasts, as the ballast is drawn from the surroundings. [10] : 22
Mechanism
A buoyancy tank that is within the pressure hull of the vehicle, as in a submarine, will be exposed to the internal pressure of the vehicle, so external pressure loads on the tank may be relatively low. In this case the ballast water transfer into the tank may not require pumping, though a positive displacement pump may still be useful to accurately control the volume of water admitted. Discharge of ballast water is against the external pressure, which will depend on depth, and will generally require significant work. [6]
If the buoyancy tank is directly exposed to the ambient hydrostatic pressure, the external load due to depth can be high, but if the internal gas pressure is high enough, the pressure difference will be lower, and the pressure vessel is not subjected to high net external pressure loads which can cause buckling instability, which can allow a lower structural weight. In the extreme case the internal pressure is high enough to rapidly eject the water ballast at maximum operational depth, as in the case of the Avelo integrated diving cylinder and buoyancy control device. A pump is used to move ambient water into the pressure vessel against the internal pressure, compressing the gas further in proportion to volume decrease, so the entire internal volume is not available to hold ballast, as although the gas will decrease in volume, there will always be some gas volume remaining. The water and air in the pressure vessel may be separated by a membrane, diaphragm, free piston, or bladder to prevent pumping out air in some orientations, and to prevent the air from dissolving in the ballast water under high pressure. [10] [4]